Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving?
Overview
This paper (CVPR 2024, NVIDIA / Nanjing University) delivers a "wake-up call" to the autonomous driving research community by demonstrating that simple baselines using only ego vehicle status (velocity, acceleration, heading) can match or outperform complex end-to-end driving models on the standard nuScenes open-loop planning benchmark. The paper shows that 73.9% of nuScenes driving scenarios are straightforward (going straight at near-constant speed), and current evaluation metrics fail to distinguish genuine scene understanding from trivial extrapolation of ego motion.
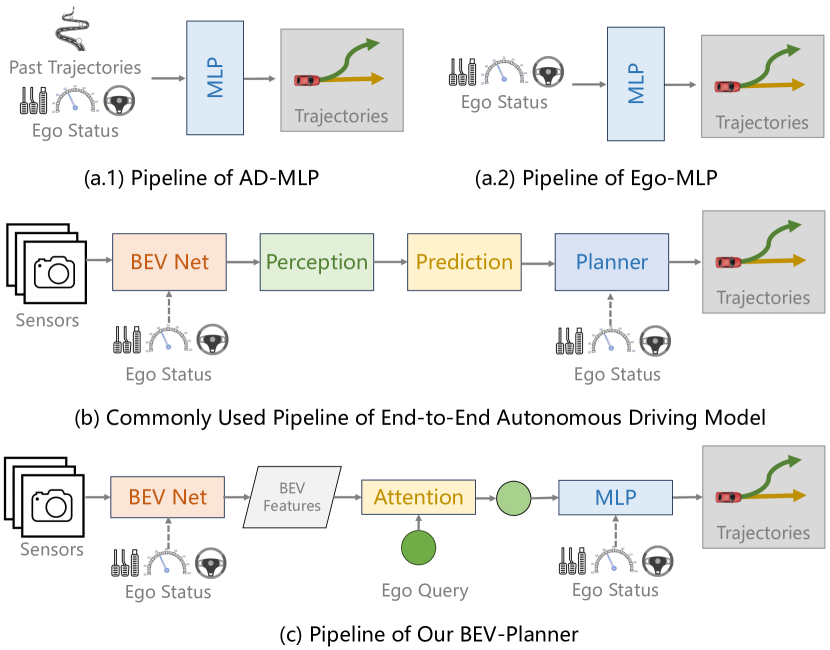
The authors introduce two minimal baselines -- Ego-MLP (a simple MLP on ego status) and BEV-Planner (adding minimal BEV features) -- that achieve competitive performance with state-of-the-art methods like UniAD and VAD, revealing fundamental flaws in how the community evaluates planning. They also propose a novel Curb Collision Rate (CCR) metric that better measures road boundary adherence.
Key Contributions
- Exposure of evaluation weakness: Demonstrates that ego status alone (without any perception) achieves competitive open-loop planning on nuScenes, invalidating claims of scene understanding
- Dataset bias analysis: Reveals that 73.9% of nuScenes consists of straight driving, making L2 displacement error dominated by trivial scenarios
- Ego-MLP baseline: A simple MLP taking only ego velocity/acceleration/heading as input achieves results competitive with complex E2E models
- BEV-Planner baseline: Adding minimal BEV features to Ego-MLP provides marginal additional benefit, showing perception features are underutilized by planners
- Curb Collision Rate (CCR): Novel metric measuring road boundary violations, providing a more meaningful signal than average L2 error
- Call for closed-loop evaluation: Argues the field must transition to closed-loop reactive simulation for meaningful planning evaluation
Architecture / Method
┌──────────────────────────────────────────────────────────────┐
│ BASELINES PROPOSED │
│ │
│ EGO-MLP (no vision at all): │
│ │
│ ┌──────────────┐ ┌────────────────┐ ┌────────────┐ │
│ │ Ego Status │────►│ MLP (3-4 layers)│────►│ Future │ │
│ │ - velocity │ │ │ │ Waypoints │ │
│ │ - acceleration│ └────────────────┘ └────────────┘ │
│ │ - heading rate│ │
│ └──────────────┘ │
│ │
│ BEV-PLANNER (minimal vision): │
│ │
│ ┌──────────────┐ │
│ │ Camera Images │ │
│ └──────┬───────┘ │
│ ▼ │
│ ┌──────────────┐ BEV Features │
│ │ Image Backbone│──────────────────┐ │
│ └──────────────┘ │ │
│ ▼ │
│ ┌──────────────┐ ┌─────────────────────┐ ┌──────────┐ │
│ │ Ego Status │────►│ MLP + Cross-Attn │─►│ Future │ │
│ │ │ │ to BEV features │ │ Waypoints│ │
│ └──────────────┘ └─────────────────────┘ └──────────┘ │
│ │
│ KEY FINDING: Ego-MLP ≈ UniAD/VAD on L2 error! │
│ (73.9% of nuScenes is straight driving) │
└──────────────────────────────────────────────────────────────┘
Ego-MLP Baseline
The simplest baseline takes only ego vehicle status as input: - Input: Ego velocity, acceleration, heading rate (no camera images, no LiDAR, no maps) - Architecture: A small MLP (3-4 layers) that directly regresses future waypoints - Output: Planned trajectory (T future waypoints in BEV)
This baseline achieves L2 errors competitive with UniAD on nuScenes, demonstrating that the benchmark can be largely solved by extrapolating current ego motion.
BEV-Planner
Adds minimal visual features to the Ego-MLP: - Input: Ego status + BEV features from a standard image backbone - Architecture: Ego-MLP augmented with cross-attention to BEV features - Output: Planned trajectory
The marginal improvement from BEV features over pure ego status is small, indicating that complex perception pipelines contribute surprisingly little to open-loop planning scores.
Dataset Analysis
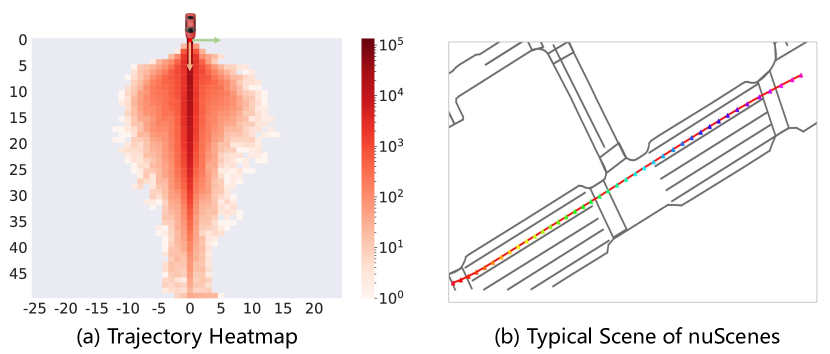
The paper provides detailed analysis of nuScenes trajectory distributions: - 73.9% of scenarios are near-straight driving - Velocity distribution is heavily concentrated around typical urban speeds - Challenging scenarios (sharp turns, stops, yielding) are underrepresented - This bias means average L2 error is dominated by easy cases where ego extrapolation suffices
Curb Collision Rate (CCR)
A new metric that measures the percentage of planned trajectories that cross road boundaries: - Requires the planner to understand road geometry, not just extrapolate motion - Ego-MLP performs significantly worse on CCR than methods with perception, providing a more meaningful differentiation - CCR better correlates with actual driving safety than average L2
Results
| Method | L2 1s (m) | L2 3s (m) | Col. Rate (%) | CCR (%) |
|---|---|---|---|---|
| Ego-MLP (no vision) | ~0.5 | ~1.9 | ~0.7 | high |
| BEV-Planner | ~0.4 | ~1.8 | ~0.6 | moderate |
| UniAD | 0.48 | 1.93 | 0.71 | lower |
| VAD | 0.41 | 1.76 | 0.57 | lower |
| ST-P3 | 1.33 | 2.90 | 1.27 | - |
- Ego-MLP matches complex E2E models on average L2 error, invalidating the metric as a measure of scene understanding
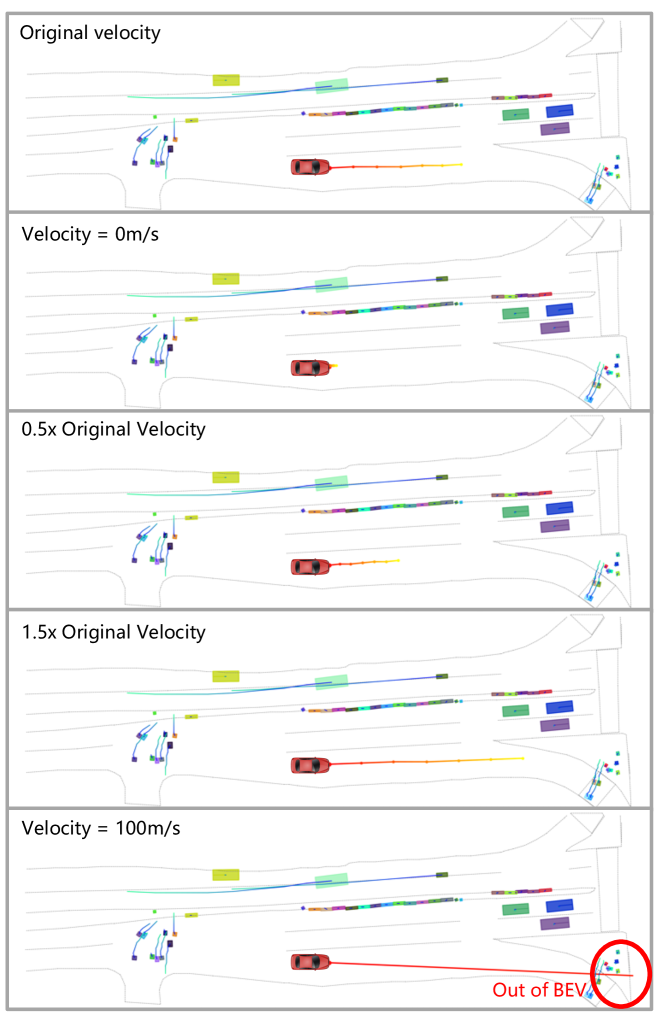
- Velocity perturbation experiments show that small changes to ego status input dominate planning output changes, confirming over-reliance on ego motion
- Feature analysis reveals that learned features in complex models converge to representations dominated by ego status information
- CCR provides better differentiation: Methods with genuine perception features significantly outperform Ego-MLP on curb collision rate
- Training dynamics show Ego-MLP converges much faster than complex models, confirming the shortcut is easy to learn
Limitations & Open Questions
- The paper identifies the problem but does not fully solve it -- closed-loop evaluation is suggested but not provided
- CCR requires map annotations which may not always be available
- The analysis is specific to nuScenes; other datasets (Waymo, CARLA) may have different bias profiles
- Does not propose a new architecture that provably uses perception features -- only exposes that current ones do not
- The fundamental tension between dataset realism (most driving IS easy) and benchmark utility remains unresolved
Connections
- Autonomous Driving -- evaluation methodology for E2E driving
- End To End Architectures -- critique of sequential E2E pipelines
- Planning -- planning evaluation metrics and benchmarks
- Planning Oriented Autonomous Driving -- UniAD, a primary target of the critique
- Vad Vectorized Scene Representation For Efficient Autonomous Driving -- VAD, another method shown to barely outperform Ego-MLP
- Nuscenes A Multimodal Dataset For Autonomous Driving -- the dataset whose evaluation is critiqued
- Para Drive Parallelized Architecture For Real Time Autonomous Driving -- concurrent work also evaluating on nuScenes